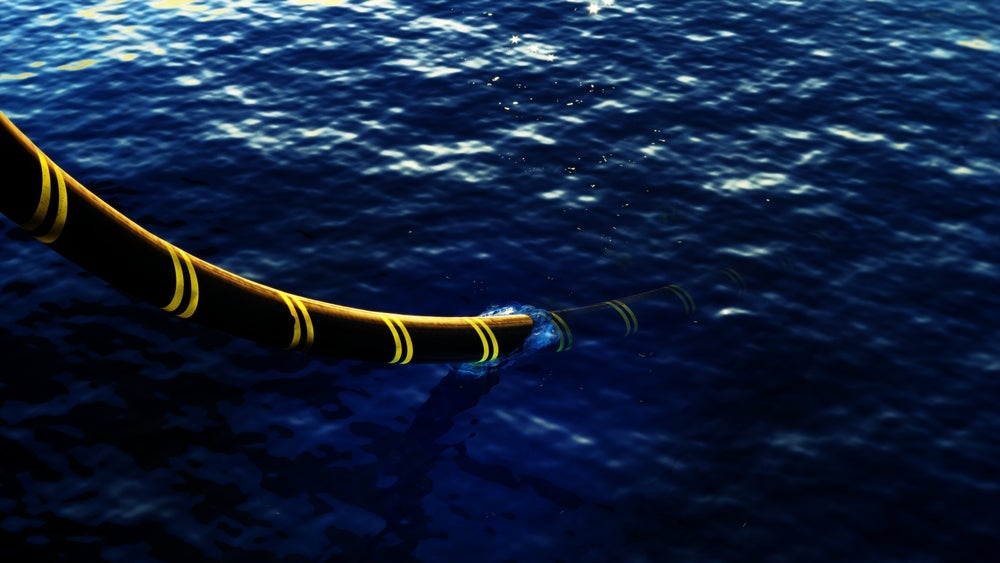
Scientists from the Massachusetts Institute of Technology (MIT) have developed new soft-bodied, small robots that can be controlled using a simple magnetic field.
The tiny robots are made using rubbery magnetic spirals and can be programmed to walk, swim or crawl in response to this easy-to-apply magnetic field.
Go deeper with GlobalData

Access deeper industry intelligence
Experience unmatched clarity with a single platform that combines unique data, AI, and human expertise.
MIT Materials Science and Engineering and Brain and Cognitive Sciences Professor Polina Anikeeva said: “This is the first time this has been done, to be able to control three-dimensional locomotion of robots with a one-dimensional magnetic field.
“And because they are predominantly composed of polymer and polymers are soft, you don’t need a very large magnetic field to activate them.”
The robots’ rubber bodies allows them to be gentle on various fragile environments, making them a possible alternative for use in a wide range applications. It is also suitable to transport cargo via confined spaces.
These cargo-carrying robots have biomedical potential, Anikeeva noted. They can be programmed to gently shake and release its payload, with the flip of a switch to reverse the magnetic field.

US Tariffs are shifting - will you react or anticipate?
Don’t let policy changes catch you off guard. Stay proactive with real-time data and expert analysis.
By GlobalDataAnikeeva informed that these soft-bodied robots can be used for delivering materials through “narrow pipes or even inside the human body”, for instance, they can carry a drug inside narrow blood vessels and release them at the exact point wherever needed.
So far, the scientists have only developed magnetic robots that move in response to the moving magnetic fields, which according to Anikeeva, makes the robot walk only when its magnet walks with it, while limiting the settings in which such robots can be deployed.
To counter this issue, a former graduate student in Anikeeva’s lab Youngbin Lee developed a new robotic solution that are not uniformly magnetised, rather they can be magnetised strategically in various zones and directions.
The body of this tiny robot, Anikeeva said, is made using two kinds of rubber, with each having different stiffness, that are sandwiched together, heated and then stretched into a thin and long fibre.
Currently, Anikeeva and her team members have made the new robots only millimetres long. However, a similar approach could be used for the production of even smaller robots.